

2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)
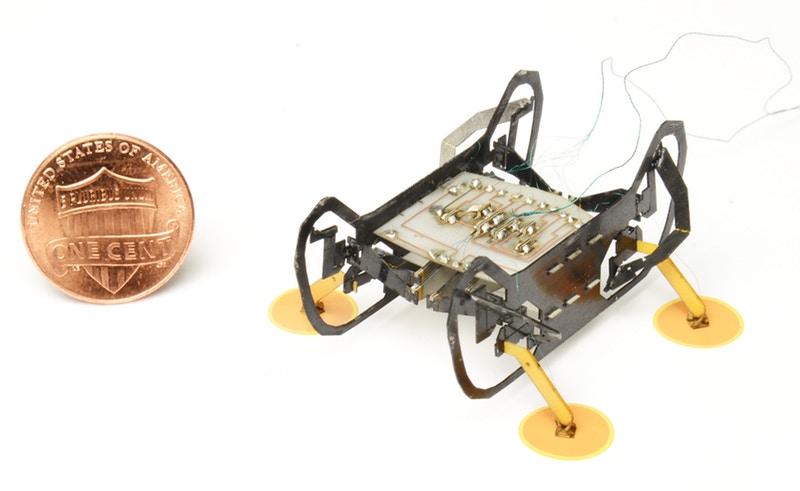
哈佛大学开发的一种微型机器人可以使用折纸式踝关节,粘性脚和独特的步态在难以触及的空间中移动。开发了一种可以爬到人类难以穿越的各种表面上的机器人,使该机器非常适合航空航天和其他应用哈佛大学的Wyss生物启发工程研究所和John A. Paulson工程与应用科学学院(SEAS)处于当前机器人工作的最前沿。该设施研究人员的最新发明 - 一种名为HAMR-E的微型机器人,带有电动脚垫,折纸踝关节和专门设计的步行步态 - 展示了这一创新。
ADM多伦多的设计与制造提供了一个独一无二的机会,可以将供应商与寻求最新创新,产品和解决方案的买家联系起来。用安大略省蓬勃发展的制造业的销售线索填补您的销售渠道。设计与制造展,2019年6月6日至6日,多伦多会议中心。
绰号HAMR-E代表哈佛动态微机器人与电粘附。研究人员在Wyss Institute的新闻发布会上表示,机器人独特的性能使其可以在垂直和倒置的导电表面上攀爬,例如商用喷气发动机的内壁。
HAMR-E可以在三个方向上进行探索,而不仅仅是在平坦的表面上来回移动,使其非常适合在困难,难以到达的区域使用,Wyss Institute的前研究员SébastiendeRivaz说道。和SEAS以及谁现在在Apple工作。
他说:“有一个全新的世界,他们可以四处走动并参与进来。”“他们有朝一日可以对大型机器难以到达的区域进行无创检查,节省公司的时间和金钱,使这些机器更安全,”他补充说。
做艰巨的任务
de Rivaz表示,机器人的这一方面非常重要,因为喷气发动机可以拥有多达25,000个零件,这使得定期维护成为一项艰巨的任务,每个发动机可能需要一个多月的时间。他说,其他复杂的机器也面临着类似的问题,那些任务是保持它们的安全和操作安全,这使得机器人也很有吸引力。
事实上,研究人员开发了HAMR-E,以应对罗尔斯·罗伊斯公司向哈佛微机器人实验室发出的挑战,该挑战特别要求设计微型机器人,这种机器人可以爬上人类工作人员无法接触的喷气发动机部件内部。
电粘垫
他们说,研究人员扩展了他们已经创建的一种名为HAMR的动态机器人的能力,因此它可以粘附并穿过喷气发动机和其他机器部件中的垂直,倒置和弯曲表面。
为此,他们创造了粘性足垫,即使倒置时也可以使机器人保持在表面上,但也可以让机器人通过抬起和放置脚来“行走”。
他们开发的焊盘由聚酰亚胺绝缘的铜电极组成。为了释放和重新接合垫,机器人打开和关闭电场。研究人员表示,该磁场的工作电压与移动机器人腿部所需的功率相似,以保持机器人的节能效果。垫也是柔性的,允许机器人在弯曲或不平坦的表面上攀爬。
旋转的关节
另一个对HAMR-E能力至关重要的设计点是新的踝关节,它可以三维旋转,以补偿腿部行走时的旋转。据团队称,这使得机器人能够在其攀爬表面上保持其方向,该团队使用分层玻璃纤维和聚酰亚胺制造接头。然后他们将它们折叠成类似折纸的结构,这样机器人的脚踝可以自由旋转,并在HAMR-E爬升时与地形对齐。
允许HAMR-E满足设计挑战的最后一块拼图是为机器人创建一个特殊的行走模式,这需要三个脚垫始终接触垂直或倒置的表面,以防止它掉落或滑落。研究人员在“科学机器人”杂志上发表了一篇关于他们工作的论文。
健壮的步行
研究表明,在垂直和倒置表面的测试中,HAMR-E可以连续行走超过一百步,而不会在倒置表面上以与其他小型攀爬机器人相比的速度分离,并且比垂直表面上的其他攀爬机器人略慢。机器人也比水平表面上的同类机器快得多,它可以在180度转弯。
HAMR-E还成功地在喷气发动机的弯曲倒置部分周围进行操纵,同时保持连接,这对于证明它能够完成设计任务至关重要,Wyss的Robert Wood,工程和应用科学教授海域。
“HAMR-E的这次迭代是第一个也是最有说服力的一步,表明这种方法可以用于厘米级攀爬机器人,并且这种机器人将来可以用来探索任何类型的基础设施,包括建筑物,管道,发动机,发电机等,“他说。
该团队计划继续努力改进HAMR-E,将传感器安装在腿部,可以检测和补偿分离的脚垫,以防止它从垂直或倒置的表面上掉下来。研究人员还在探索在非导电表面上使用HAMR-E的选择。






2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)