

2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)
加州大学圣地亚哥分校的研究人员正在使用神经网络为机器人手指提供与人类相似的敏感度。加利福尼亚大学圣地亚哥分校雅各布工程学院的一组研究人员正在开发一种用于柔性执行器的触摸感知系统,这种系统有朝一日可以让机器人像人类一样具有类似人类的灵敏度。该项目是在由Michael Tolley教授领导的Bioinspired机器人和设计实验室内进行的。该实验室还与更大的Contextual Robotics Institute相关联。这项工作发表在最近一期的“科学机器人”杂志上。
加州大学圣地亚哥分校的机械工程博士生Benjamin Shih和团队成员之一告诉Design News,他们的想法是开发一种使用机器学习的嵌入式触摸感知模型。该团队使用运动检测系统提供反馈,以训练复发神经网络,然后在训练完成时断开该系统。这个过程可以比较教导学生在灯光打开的情况下弹钢琴,然后关灯,并让他们仅依靠他们的触觉来展示技巧。
加拿大设计与制造部门专注于对您而言至关重要的最新软件和产品。深入探索生成设计,电子元件,3D打印,快速原型设计和机器学习等令人兴奋的创新。学到更多!
“我们并没有明确地实时计算我们的运动学,但我们也不是每次都从头开始学习,”Shih说,描述模型。“如果你从生物学中得出一些相似之处或灵感,就像人们如何学习如何感觉和识别物体,或物体有多远,这是一些组合。“
通过在自由空间中展开的致动器以及沿着其长度和在尖端处与物体接触允许一个和两个自由度来执行实验。Shih说,这个项目让他对人体皮肤的“令人难以置信的分辨率”有了新的认识。
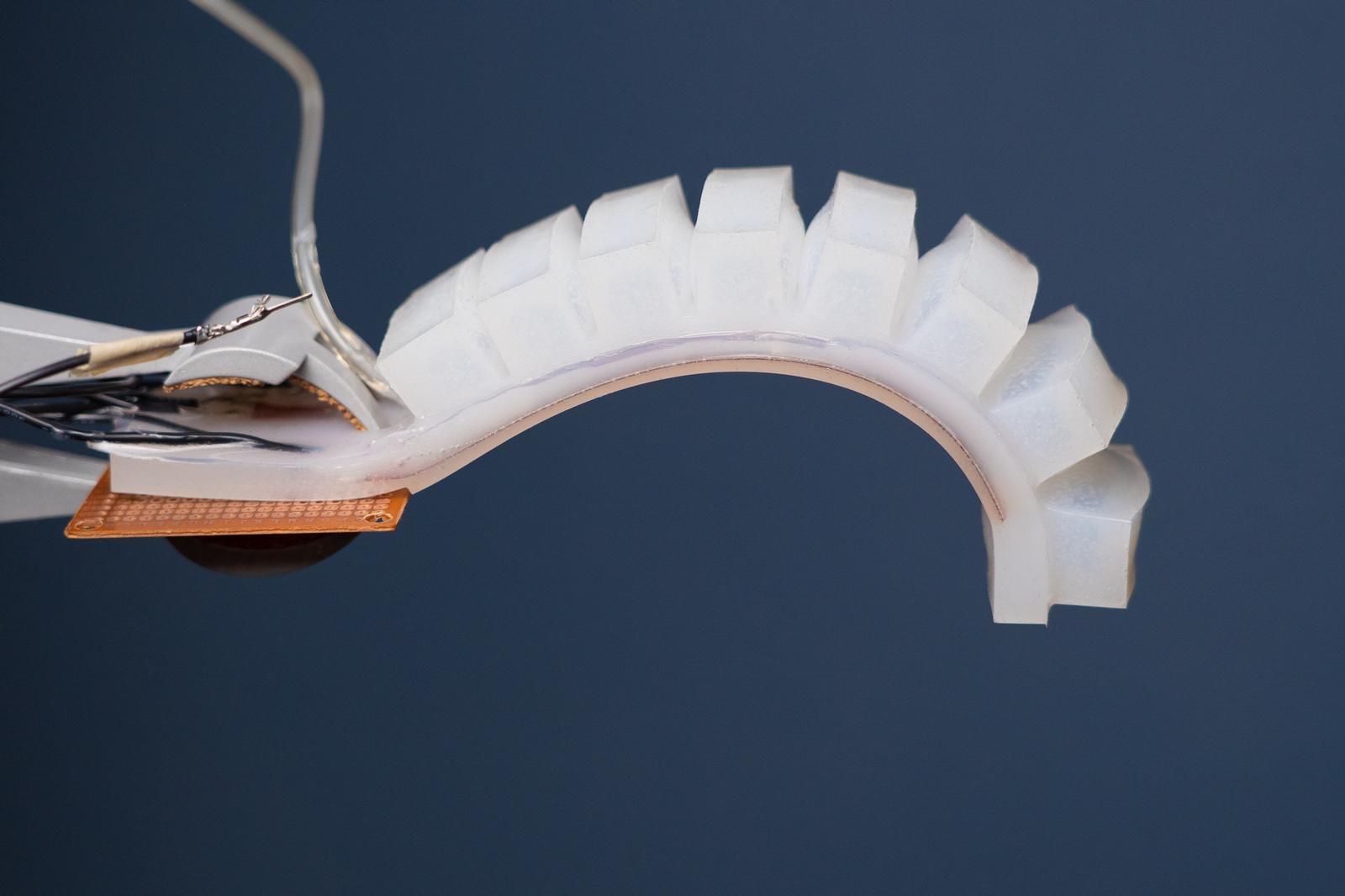
对于他们的项目,研究人员制作了一套软应变传感器,其中包含浸渍有导电碳纳米管(cPDMS)的聚二甲基硅氧烷(PDMS)层。它们嵌入手指式致动器的层中。这些软传感器不像传统的刚性应变传感器那样限制运动范围,因此可以实现更大的工作空间。
然而,它们目前不太准确,并且可能会漂移。这种不足至少部分地通过使用多个冗余传感器得到补偿。每个传感器为任何类型的应变(例如拉伸,扭转,压缩等)提供单个无差别输出,但组合输出足以提供致动器位置和它所承受的力的合理近似。
毫无疑问,机器人技术将很快在我们的工作场所,家庭和医疗保健中发挥越来越重要的作用。随之而来的是他们可能对人或财产造成伤害或伤害。当然,精度和响应性的提高将有所帮助,但使用更柔软,可变形的材料也将发挥重要作用。可变形材料的问题在于它们的非线性行为,这使得控制它们成为一种挑战。
此外,在这些机器人将要运行的不受控制的“现实世界”环境中,它们必须为意外事件做好准备,例如接触外部物体,而不会迷失方向。这表明需要某种类型的嵌入式运动学模型,像哥伦比亚大学的研究人员这样的团体一直在发展。
这些方面的其他工作包括中国南开大学雷孙教授的工作,他开发了一种改进串联弹性执行器系统控制的算法。与此同时,科罗拉多大学的研究人员正在研究使用介电弹性致动器来提供类似肌肉的行为。






2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)