

2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)
微创外科手术越来越多地用于靶向小病变,并且对微型医疗工具的需求不断增长。这些包括微导管,铰接的微型镊子或镊子,用于在精密手术中进行感应和促动。化学和物理传感器的准确集成和功能化仍然是主要挑战。在一项关于科学机器人的新研究中,中国医疗机器人研究所和伦敦哈林机器人手术中心的Antoine Barbot及其同事开发了一种新型的微机器人平台,以对140至830微米(µm)的纤维进行功能化。然后,他们使用湿转移工艺将2 mm x 3 mm和200 µm厚的微型机器人对准纤维上的浮动电子电路。
科学家使用永磁体控制微型机器人在空气-水界面处的位置和方向。他们利用磁体的非均匀磁场控制了两个微型机器人之间的精确距离,并通过浮动电子图案促进了“抓取和释放”的操纵。Barbot等。他提出了这种控制过程的模型,包括微机器人通过表面张力的相互作用,以进行详细的性能验证。他们演示了在直径200 µm的光纤和3-D设备上的各种示例传感器实施例。
临床上对改善医疗监视和诊断的重视使外科手术的未来转向了精确干预。最近在纤维上形成机械手的机器人工具的引入使研究人员能够在单根纤维内结合成像,传感和显微操作。可以使用双光子聚合将精密的微夹具直接设计在纤维的尖端上。研究人员可以使用利用微毛细管功能的液压连杆来建立微致动,以将该设备用于靶向药物输送和聚焦能量(例如激光消融)。光纤是开发灵活的微型工具的通用基材。它们的表面提供了理想的位置,可以沿其长度包括多个传感器。
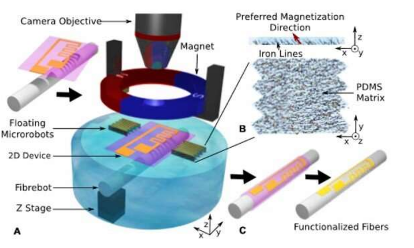
顶部:具有不同首选磁化方向的浮动微型机器人:制造和控制原理。(A)微型机器人的制造。使用环形磁体在材料中编程了不同的磁化方向。(二)在本研究中使用的夹紧机制。微型机器人根据磁体的垂直位置一起移动或分开移动,从而可以有效地夹紧要转印的图案,然后进行旋转和方向控制。底部:PDMS矩阵内部的铁线方向。(A)聚合物/铁混合物的Micro-CT重建。在聚合物固化过程中,铁线与磁场方向对齐。(B)铁线方向与位置。铁线的方向遵循固化磁场的方向。图片来源:Science Robotics,doi:10.1126 / scirobotics。
然而,将微电子器件直接图案化到用于临床应用的弯曲小物体上是具有挑战性的,因为现有的微加工工艺主要是针对平面基板而设计的。迄今为止,研究人员使用了两种主要的传输方法:包括干转移和湿转移技术。由于没有湿蚀刻剂和流体干扰,与湿转移相比,干转移通常提供更好的清洁度和更高的精度。在外科手术中可能发生的湿转移技术受到精确定位和ing起漂浮装置的困难的限制。这是由于缺少用于精确实际方法的精密工具或机器人平台。因此,微型机器人操纵器可以解决手动湿转移方法面临的一些主要问题。
在目前的工作中,Barbot等人。提出在空气/水界面使用移动微型机器人来精确控制湿转印期间的图案运动。为了促进简单和精确的控制,科学家提议开发一对微型机器人来掌握浮动模式。他们使用单个永磁体产生的磁场来实现此目的,该永磁体被耦合以调整机器人组成材料的磁化方向。Barbot等。利用微型机器人和磁场之间的相互作用将微型机器人对定位在空气/水界面的两个不同位置,并形成抓取器。
基于微型机器人的模式抓取和操纵。图片来源:Science Robotics,doi:10.1126 / scirobotics.aax8336
研究人员通过控制设备与磁铁之间的距离来控制两个微型机器人之间的距离。他们使用弹性体和聚二甲基硅氧烷(PDMS)混合铁粉来构造设备。对于给定的实验,Barbot等人。使每个微型机器人磁化,以对给定磁场做出类似反应。科学家在弱磁场的影响下使用了200 µm的PDMS和铁混合物层,将铁线组装到PDMS矩阵中。他们对PDMS进行了热固化,以使铁线结构保持在适当的位置,并使用X射线显微断层照相术评估了产品的方向。
科学家利用铁/ PDMS层的不同部分开发了具有自定义磁化方向的微型机器人,从而形成了厚度为200mm的尺寸为2mm x 3mm的矩形机器人。他们在微型机器人上增加了小的牙齿状结构,以限制抓握过程中图案的运动。该团队观察了不同微型机器人对的位置以及它们对磁体不同垂直位置的响应,以获得微型机器人对的两个运动模式,具体取决于它们的磁化强度与水平面之间的角度(α)。
Barbot等。设计了微型机器人,并允许磁铁的高度控制两个机器人之间的距离,并调节微型机器人抓爪的打开和关闭。科学家将实验结果与模拟进行了比较,以了解微型机器人之间的相互作用。他们观察到四个自由度(DOF)来控制微型机器人对。其中包括湿转移过程中的抓握(一个自由度),定位(两个自由度)和方向(一个自由度)。科学家使用这四个可控制的输入来操纵浮动模式。他们将铁/ PDMS混合物的磁化特性表征为一致的微型机器人设计的一般指南。
该团队优化了拟议的微型机器人辅助湿传输方法,以设计各种设备。他们通过将具有图案的纤维转移到印刷电路板上来形成电子设备,并使用25 µm的金线实现了电连接。他们形成了这种电化学传感器,可用于微导管中和其他可植入设备。科学家还展示了使用几层不同材料的制造技术,以在直径200 µm的玻璃纤维上形成一个两端石墨烯器件。他们选择石墨烯是因为该材料具有独特的电极特性。他们使用该方法将有源机电设备集成到3-D基板上,然后在复杂的3-D结构上进行构图。例如,他们在170 µm玻璃毛细管纤维尖端微型工具(使用双光子光刻技术制造)上转移了Au图案。这项工作将为使用混合微细加工技术在微观规模上设计复杂的机电设备铺平道路,该技术在精确的临床生物标志物检测和精确手术中具有广泛的应用。
这样,Antoine Barbot和一组跨学科的研究人员提出了一种实用的解决方案,可以将微米级精度的薄膜和2-D晶体湿转移到3-D基板上。他们开发了一种浮动磁微型机器人,该机器人能够存储首选的磁化方向,以便在永久磁场下对其进行操纵。研究团队通过调整磁体的位置来微调机器人微型抓爪,以抓取,对齐和释放浮动的二维图案。
提议的设置简单,可重复且可靠。新的制造技术将为介入手术中的电化学传感器,微致动器和复杂的二维电子设备打开新的应用领域。Barbot等人的未来重点。它将包括基于多层范德华2-D晶体的工程分层设备,以将活性成分整合到纤维尖端上,并最终形成可驱动和感应能力驱动的纳米级或微米级纤维机器人。






2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)