

2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)
许多动物和微生物能够完成复杂的任务,例如寻找食物或建立巢穴,团队或“群体”。其中一个最明显的例子就是蜜蜂,因为它们作为一个群体的生存在很大程度上取决于与其殖民地其他成员的合作。在过去几年中,越来越多的研究人员试图在机器人中重现这些迷人的群体动力学,从而形成了一个称为群体机器人的研究领域。
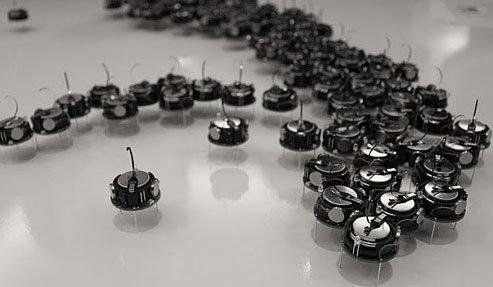
利兹大学的研究人员最近提出了一种新的群体机器人方法,称为趋化性,受到微生物中观察到的特定行为的启发。他们的研究预先发表在arXiv上,源于作者对动态现实环境中简单无脊椎动物生存的兴趣,以及这些策略如何应用于机器人。
“在我的博士和第一次博士后研究期间,我研究了一种名为秀丽隐杆线虫(一种流行的模式生物)的小蠕虫的运动系统,并成功运用我学到的来控制蛇形机器人的运动,”开展这项研究的研究人员之一乔丹·博伊尔告诉TechXplore。“目前的工作受到同一生物体的启发,但这一次,正在考虑其更高层次的行为 - 特别是它利用其嗅觉导向食物来源的方式。”
在没有感觉输入的情况下,秀丽隐杆线虫通常向前移动,但是以随机的时间间隔进行大转弯。如果他们感觉到“正面”气味随着它们向特定方向移动而变得越来越强烈,它们的转动频率就会降低。相反,当“正面”或“期望”气味变弱时,它们的可能性更大。这种被称为趋化性的行为最终会让他们倾向于所需的感官刺激达到顶峰的位置。在他们的研究中,博伊尔,他的同事穆罕默德·多尔达和博士生西蒙·奥布特开始复制这个机器人群中的群策略并评估其有用性。
“这种策略的一个主要好处是它只需要一个模拟传感器,因为动物移动时会随着时间的推移检测到梯度,”Boyle解释道。“在我们的工作中,我们已经用声音取代了气味,因为它更容易用机器人创造和感知,并且随着你从源头进一步变得更弱,”Boyle解释道。“这种方法的主要优点是它允许一组群体机器人被限制在特定区域(即声源周围),而不需要物理边界,映射能力或复杂的传感系统。”
该视频显示了机器人随机探索环境以收集感兴趣的项目的模拟。目标仅限于特定区域,但机器人不是。正如人们所预料的那样,他们设法收集了不少目标,但随着时间的推移,他们离开工作区而未能收集其余的目标。
研究人员使用他们开发的算法,将趋化性应用于一群探索机器人,最终促使他们返回到位于无限环境中的巢穴周围的特定工作区域。他们在一系列模拟和硬件验证实验中测试了它们的性能,从而测试了它们的方法的有效性。虽然他们的结果主要是基于模拟而不是现实世界的实现,但研究人员发现他们成功地整合了声音传播的精确模型。
“我们的硬件结果是初步的,但在这一点上很有希望,”Boyle说。“最终,这项工作可能与物理群体有关,这些群体由非常小,廉价的机器人组成,具有有限的感官和计算能力。虽然实际上,机器人群的实际部署还有一段距离,但它们在许多应用中具有潜力。”
在未来,真实机器人的实验可以帮助确定这种新的生物启发方法的有效性。如果这些测试产生积极的结果,Boyle及其同事开发的算法最终可用于增强机器人群的导航和定向策略,特别是当他们导航的环境没有明确映射或定义时。
第二个视频实现了趋化机制。同样,机器人正试图通过随机探索收集所有目标。但是,该区域中间现在有一个声源。当机器人检测到声音强度低于某个值时,他们开始使用趋化性行为向源头移动(通过增加/减少他们根据声音是否越来越强的随机转弯的机会)。仍然没有物理屏障或任何东西,我们可以看到该机制非常有效地将它们限制在感兴趣的区域。
Obute目前正致力于将趋化性整合到更复杂的群体机器人系统中,模拟以及一些硬件实验中。他的最终博士学位 该项目专门研究了使用群机器人进行城市垃圾收集的可能性。另一方面,博伊尔计划继续探索可能对机器人应用特别有用的生物策略。
“目前,我有兴趣将类似技术应用于我所参与的一个重大项目,旨在开发用于监测下水道和供水网络完整性的机器人系统,”Boyle说。






2016-2022 All Rights Reserved.平安财经网.复制必究 联系QQ 备案号:
本站除标明“本站原创”外所有信息均转载自互联网 版权归原作者所有。
邮箱:toplearningteam#gmail.com (请将#换成@)